Carissime e carissimi, l’andamento di questo post illustra in modo preclaro i rischi che si corrono a voler essere spiritosi.
Sicuramente abbiamo anche imparato qualcosa sulla fisica del consumo degli pneumatici, la mia pretesa di farlo dipendere solo dalla lunghezza del cammino percorso è stata spazzata via dall’ottimo ronfo: non ci sono due penumatici che si consumano nello stesso modo. Di conseguenza, la mia riflessione si allontana dalle gomme per tornare sulla (giusta) strada.
Quanta strada percorrono le ruote (anche prive di gomma) di destra e quanta quelle di sinistra? Esiste una asimmetria irriducibile nelle reti stradali che obbliga ad una differenza tra i due cammini?.
Sia chiaro: è evidente che un cammino dato avrà, in generale, qualche asimmetria. Quello che mi interessa è una (eventuale) proprietà generale: per “media” intendo precisamente questo.
Siamo interessati alla differenza tra il cammino della ruota destra e quello della ruota sinistra, $l_{\text D}-l_{\text S}$.
Evidentemente, su una strada rettilinea tale differenza è nulla: per le curve enunciamo il
Teorema 1
La differenza tra il cammino destro e quello sinistro di una curva non dipende dal raggio di curvatura.
Questo teorema è già stato dimostrato da franco nel suo primo intervento: sia $r$ il raggio di curvatura del cammino destro, sia $a$ la lunghezza dell’asse congiungente le due ruote; in una curva a destra la differenza tra i due cammini vale
$\displaystyle l_{\text D}-l_{\text S}=r\Delta\vartheta-\left(r+a\right) \Delta\vartheta =-a\Delta\vartheta$
in una curva a sinistra la differenza tra i due cammini vale
$\displaystyle l_{\text D}-l_{\text S}=r\Delta\vartheta-\left(r-a\right) \Delta\vartheta =a\Delta\vartheta$
dove $\Delta\vartheta$ è l’angolo sotteso alla curva, misurato nel verso trigonometrico; in entrambi i casi la differenza è indipendente da $r$.
Questo risultato è importante perché rende ininfluente un’asimmetria osservata da Infinito e da Gianfranco: dato che si viaggia sulla corsia di destra, quando la stessa curva è percorsa in un verso o nel verso opposto si percorrono cammini di lunghezza diversa, quello della corsia interna essendo più corto di quello della corsia esterna alla curva. È vero che il cammino percorso dal veicolo è diverso ma la differenza tra destra e sinistra è la stessa.
Per rendere ancora più astratto il problema enunciamo la
Definizione 1
Definiamo l’eccesso ϵ di una curva come la differenza tra il cammino destro e il cammino sinistro, divisa per la lunghezza dell’asse (vedi, Gianfranco, che ci avevo pensato?)
$\displaystyle \epsilon=\frac{ l_{\text D}-l_{\text S}}a=\Delta\vartheta$
Questa definizione chiarisce che $\epsilon$ è una proprietà della rete stradale che stiamo considerando e ci fornisce un modo per misurarla: è sufficiente misurare con una bussola il proprio orientamento e sommare le variazioni di orientamento che si hanno lungo il cammino; tali variazioni saranno positive o negative a seconda che il cammino curvi verso sinistra o verso destra.
Nel caso particolare di cammini rappresentabili da un grafo planare e privi di circuiti chiusi vale il
Teorema 2
L’eccesso di un cammino planare e privo di circuiti chiusi dipende solo dagli orientamenti iniziale e finale
$\displaystyle \epsilon= \vartheta_f-\vartheta_i$
Come ci fa notare sagacemente Gianfranco, le curve a destra e a sinistra si compensano tra loro (vedere figura)
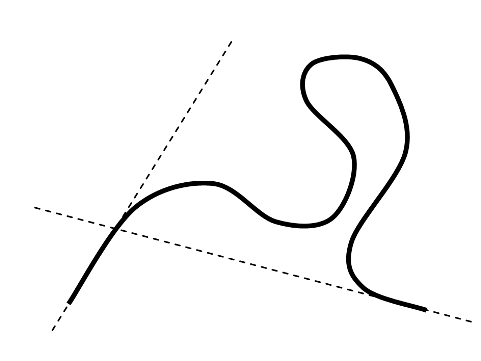
- gomme_fig01_480x360.png (12.62 KiB) Visto 4058 volte
e l’eccesso risultante è uguale a quello che si avrebbe seguendo i cammini rettilinei. Inoltre, consideriamo la rete stradale in figura
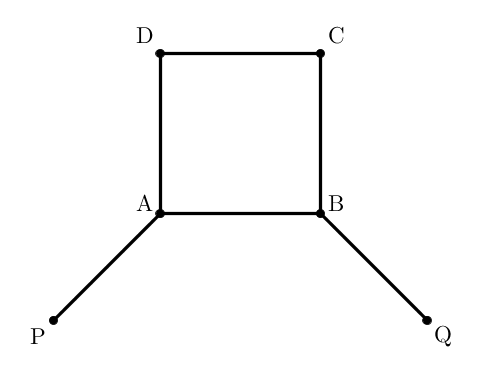
- gomme_fig02_480x373.png (5.23 KiB) Visto 4058 volte
Seguendo il cammino $\text{P-A-B-Q}$ abbiamo un eccesso $\epsilon=-\pi/2$, la differenza tra l’orientamento iniziale e quello finale; se invece seguiamo il cammino $\text{P-A-}\left(\text{B-C-D-A-}\right)_k\text{B-Q}$ avremo un eccesso $\epsilon=2k\pi-\pi/2$.
Considerazioni analoghe possono essere fatte se la rete non è planare: per esempio, salendo ad un piano rialzato di un autosilo si percorrerà una spirale con un eccesso di $\pm 2\pi$ ad ogni giro (il segno dipende dal verso in cui si avvita la spirale).
Enunciamo ora il
Teorema 3
L’eccesso di un dato cammino è l’opposto dell’eccesso dello stesso cammino percorso nel senso opposto.
Invertendo il senso di marcia tutte le variazioni di orientamento positive diventano negative e viceversa quindi la loro somma cambia di segno.
Per esempio, consideriamo ancora la figura precedente: seguendo il cammino $\text{P-A-B-Q}$ abbiamo, nel passaggio da $\text{P-A}$ ad $\text{A-B}$, una variazione di orientamento $\Delta\vartheta_1=-\pi/4$; nel passaggio da $\text{A-B}$ a $\text{B-Q}$ abbiamo una ulteriore variazione di orientamento $\Delta\vartheta_2=-\pi/4$ e l’eccesso è $\epsilon=-\pi/2$.
Seguendo il cammino $\text{Q-B-A-P}$ le variazioni di orientamento sono $\Delta\vartheta_1=\pi/4$ passando da $\text{Q-B}$ a$\text{B-A}$ e $\Delta\vartheta_2=\pi/4$ passando da $\text{B-A}$ ad $\text{A-P}$, con $\epsilon^{\prime}=\pi/2$.
Corollario 3.1
Un ovvio corollario di questo teorema è che l’eccesso di una rete stradale è determinato unicamente dall’eccesso dei tratti a senso unico.
Infatti, l’eccesso di ciascun tratto a doppio senso di marcia è nullo, quindi $\sum\epsilon_i=\sum\epsilon_{i,u}$.
Discutiamo ora la topologia di una rete stradale. Per essere viabile una rete stradale deve poter essere percorsa tutta dai veicoli: si deve cioè poter partire da un qualsiasi nodo della rete e raggiungere qualsiasi altro nodo (cosa che implica anche il ritorno dal nodo di arrivo al nodo di partenza).
Forti di ciò enunciamo la
Definizione 2
Si definisce “viabile” una rete nella quale tutte le sottoreti sono collegate al loro complemento da almeno due cammini a senso unico opposto (dovrebbe essere intuitivamente chiaro cosa si intende per “complemento”).
Consideriamo per esempio una città divisa in due da un fiume. Se non vi sono ponti abbiamo due sottoreti che non sono tra loro connesse; viceversa, se vi è un ponte a senso unico è possibile passare da una sottorete all’altra ma non ritornare indietro: sono necessari due ponti a senso unico inverso per rendere la rete viabile. Un ponte a doppio senso di marcia va bene lo stesso: nota bene che, sebbene sia equivalente da un punto di vista topologico, ai fini del nostro problema le due situazioni sono diverse.
Ed ecco la
Definizione 3
Si definisce “rete coniugata” la rete stradale $A^{*}$ ottenuta invertendo tutti i sensi unici di una rete stradale $A$ data.
Il
Teorema 4
La coniugata di una rete viabile è anch’essa viabile; la coniugata di una rete non viabile è anch’essa non viabile.
Basta osservare che, in una rete viabile tutte le sottoreti sono connesse almeno da due cammini a senso unico inverso: invertendo tutti i sensi unici tali coppie rimangono a senso inverso; viceversa, se almeno due sottoreti sono connesse da un senso unico l’inversione di detto senso unico lo lascia unico e la rete coniugata non è viabile.
E il
Teorema 5
L’eccesso di una rete è l’opposto dell’eccesso della sua rete coniugata.
Nella rete coniugata tutti i sensi unici sono invertiti e i rispettivi cammini vengono percorsi nel senso inverso rispetto alla rete di partenza: per il Teorema 3 gli eccessi di ciascun cammino a senso unico sono opposti quindi l’eccesso totale è opposto.
Questo significa che la media tra una rete e la sua coniugata è una rete senza sensi unici e con eccesso nullo.
Finora, però, non abbiamo parlato di ciò che avviene nei nodi della rete; ho identificato tre tipi di nodo: incroci, rotonde e svincoli (che Infinito chiama “rampe”).
Consideriamo prima gli incroci: anche se gli accessi all’incrocio non sono curvi il percorso di un veicolo avviene su curve (per ragioni fisiche) ma per il Teorema 1 l’eccesso non dipende dal raggio di curvatura, fosse pure $0$; inoltre, il Teorema 2 qui torna utile e l’eccesso dipende solo dall’orientamento relativo degli accessi stessi.
Per un incrocio perpendicolare, la svolta a destra ha eccesso $\epsilon=-\pi/2$, l’attraversamento ha eccesso $\epsilon=0$ e la svolta a sinistra ha eccesso $\epsilon=\pi/2$.
Naturalmente, percorrendo lo stesso incrocio nel senso opposto gli eccessi cambiano segno, per il Teorema 3, e la media è nulla.
Per le rotonde, il discorso è analogo con due eccezioni: la prima è che la rotonda è un circuito chiuso e può essere percorso quante volte si vuole (ricordiamoci che le rotonde sono “nodi” della rete: le rotonde della rete coniugata si percorrono nello stesso verso della rete di partenza, verso sinistra); la seconda, ben più importante, è che la rotonda consente l’inversione a U, non prevista nell’incrocio.
Il valzer della rotonda comporta ovviamente un eccesso di $2\pi$ a giro mentre le inversioni a U comportano un eccesso pari a $k\pi$ dove $k$ è il numero di accessi alla rotonda.
Per gli svincoli il Teorema 2 non è applicabile perché non sono in generale rappresentabili da una rete planare: azzardo un valore medio di $-2\pi$ a svincolo, considerando che anche gli svincoli sono “nodi” della rete e gli svincoli coniugati si percorrono sempre verso destra (apro ufficialmente la caccia ai diversi tipi di svincolo per un computo più esatto).

- gomme_fig03_640_320.jpg (44.6 KiB) Visto 4058 volte
Oh, discorso invertito per Inghilterra, Giappone, Malesia ecc.